Menggerakkan servo dengan mikrokontroler AVR/atmega biasanya menggunakan PWM (Timer) namun. Namun pada chip AVR seperti ATmega8 hanya memliki 3 pin OC (output dari comparator) juga ATmega16, 32 memiliki 4 pin OC, ATmega328 5 pin OC.
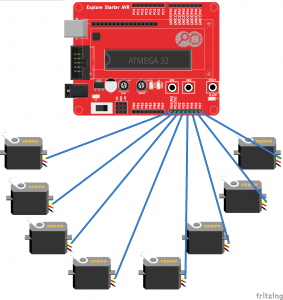
Untuk menggerakkan servo lebih banyak (multi servo) dari ketersediaan pin OC, bisa digunakan metode dua timer interrupt, yaitu :
- Timer1 berfungsi membangkitkan frekuensi 50Hz (periode 2ms) yang ditetapkan spesifikasi servo umum.
- Timer0 berfungsi mengatur lebar pulsa untuk masing-masing servo.
pengaturan
Servo memiliki sensor resistansi (potensio) untuk mendeteksi posisi dari aktuator. Terkadang ada servo yang nilai resistansinya berbeda-beda. untuk itu perlu diatur nilai offset dan tick-nya. berikut ini bebera variabel yang harus diatur sebelum digunakan:
Mengatur servo dengan atmega / AVR menggunakan codevision/Atmel studio harus memperhatikan bilangan pecahan, jadi pastikan hasil perhitungan posisi servo tepat.
#define F_CPU 16000000L #define jumlahServo 8 //Servo 1 = pin 0, servo 2 = pin 1 #define portServo PORTD //kalibrasi #define servoTickOffset 1200 #define servoTickMinimum 0 #define servoTickMaksimum 4000L
berikut listing programnya: (AVR Studio 6.2, ATmega32A)
#define F_CPU 16000000L
#include <stdint.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#define jumlahServo 8 //Servo 1 = pin 0, servo 2 = pin 1
#define portServo PORTD
//kalibrasi
#define servoTickOffset 1200
#define servoTickMinimum 0
#define servoTickMaksimum 4000L
volatile uint16_t servo[jumlahServo];
#define servoPortMask 0xFF >> (8-jumlahServo)
ISR(TIMER1_COMPA_vect)
{
portServo = 0xFF;
TCCR0 = (1<<WGM01) | (1<<CS00); // CTC, prescale 1, top ocr1a
}
ISR(TIMER0_COMP_vect)
{
uint8_t nilaiPort = 0x00;
uint8_t byteNilai;
for(uint8_t i=0;i<jumlahServo;i++)
{
uint16_t tick = servo[i] * (uint8_t)((servoTickMaksimum - servoTickMinimum) / 180);
if(tick + servoTickOffset < TCNT1)
{
byteNilai = 0x00;
}
else
{
byteNilai = 0x80;
}
nilaiPort = byteNilai | (nilaiPort >> 1);
}
nilaiPort >>= (8 - jumlahServo);
nilaiPort &= servoPortMask;
portServo = nilaiPort ;
if(TCNT1 > servoTickOffset + servoTickMaksimum)
{
TCCR0 = 0;
}
}
int main (void)
{
(*(&portServo - 1)) = 0xFF; //port sebagai output
OCR0 = 88 - 1;
TIMSK = (1<<OCIE0);
TCCR1A = 0;
TCCR1B = (1<<WGM12) | (1<<CS11); // CTC, prescale 8, top ocr1a
OCR1A = 20000 - 1;//50Hz
TIMSK |= (1<<OCIE1A);
sei();
while(1)
{
for(uint8_t i=0;i<180;i++)
{
servo[7] = i;
_delay_ms(10);
}
for(uint8_t i=180;i != 0;i--)
{
servo[7] = i;
_delay_ms(10);
}
}
}