Modbus adalah sebuah protokol komunikasi antar perangkat. Modbus tergolong sebagai komunikasi serial dengan kelebihan mampu berkomunikasi dalam bus data (lalu lintas data), jadi dalam sebuah jaringan modbus bisa menghubungkan lebih dari 2 alat (hingga 254 alat/perangkat). Contoh penggunaan protokol modbus adalah programmable logic controllers (PLCs) serta supervisory control and data acquisition (SCADA).
Dalam protokol modbus terdapat fungsi-fungsi diantaranya :
- Coils (1 bit) baca/tulis
- Discrete Inputs: (1 bit) hanya baca
- Input Registers: (2 byte) hanya baca
- Holding Registers: (2 byte) baca/tulis
Komunikasi antara perangkat dalam jaringan modbus digambarkan dalam diagram berikut :
![]()
RS485
rs485 adalah perangkat elektronika pengirim dan penerima data (serial) umumnya menggunakan dua kabel dengan karakteristik sinyal yang seimbang. rs485 juga mampu menghubungkan lebih dari 2 perangkat komunikasi (multipoint).
rs485 sering dimanfaatkan sebagai perangkat tambahan dalam komunikasi modbus.
Pembacaan modul PZEM modbus dengan arduino sebagai master
modul pzem dikenal sebagai modul pembaca tegangan, arus, daya, energi, frekuensi dari listrik. beberapa diantaranya mendukung protokol modbus. dalam contoh ini digunakan modul pzem 003 yaitu modul pengukuran dc.
skema komunikasi modbus berbasis arduino:
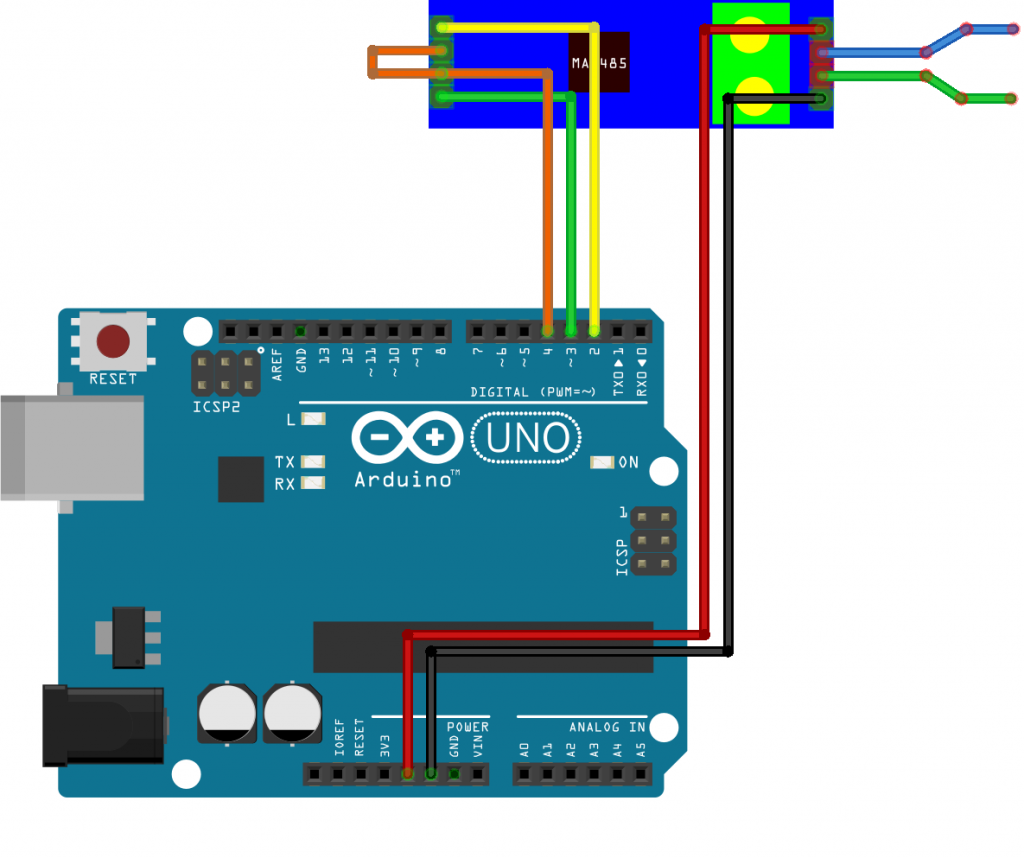
komponen yang digunakan :
- Arduino uno
- modul serial rs485
sketch/program arduino untuk pembacaan sensor pzem :
#define pinModBusTX 4
#include <SoftwareSerial.h>
SoftwareSerial pzem(2, 3); // RX, TX
byte perintah[] = {0x01, 0x04, 0x00, 0x00, 0x00, 0x08};//readInputRegisters
byte bufferDataModbus[100];
byte *ptr;
void setup() {
pinMode(pinModBusTX, OUTPUT);
Serial.begin(9600);
Serial.println(F("Komunikasi Modbus dengan arduino sebagai master (read input register tanpa library)"));
Serial.println(F("https://www.project.semesin.com"));
Serial.println();
pzem.begin(9600);
ptr = bufferDataModbus;
}
void loop()
{
uint16_t crc = calcCRC(perintah, sizeof(perintah));
digitalWrite(pinModBusTX, HIGH);
delay(1);
pzem.write(perintah, sizeof(perintah));
pzem.write(lowByte(crc));
pzem.write(highByte(crc));
delay(10);
digitalWrite(pinModBusTX, LOW);
long millisResponModbus = millis() + 1000;
while (!pzem.available())
{
if (millisResponModbus < millis())
{
break;//timeout
}
}
while (pzem.available())
{
byte b = pzem.read();
*ptr++ = b;
delay(2);
}
if (memcmp(bufferDataModbus, perintah, 2) == 0)
{
ptr = bufferDataModbus;
float tegangan = ((ptr[0 + 3] << 8) + ptr[1 + 3]) * 0.01;
float arus = ((ptr[2 + 3] << 8) + ptr[3 + 3]) * 0.01;
float daya = (((uint32_t)ptr[6 + 3] << 24) + ((uint32_t)ptr[7 + 3] << 16) + (ptr[4 + 3] << 8) + ptr[5 + 3]) * 0.1;
float energi = (((uint32_t)ptr[10 + 3] << 24) + ((uint32_t)ptr[11 + 3] << 16) + (ptr[8 + 3] << 8) + ptr[9 + 3]);
uint16_t alarmHigh = ((ptr[12 + 3] << 8) + ptr[13 + 3]);
uint16_t alarmLow = ((ptr[14 + 3] << 8) + ptr[15 + 3]);
memset(bufferDataModbus, 0x00, sizeof(bufferDataModbus));
Serial.println("==========");
Serial.print("tegangan = ");
Serial.println(tegangan);
Serial.print("arus = ");
Serial.println(arus);
Serial.print("daya = ");
Serial.println(daya);
Serial.print("energi = ");
Serial.println(energi);
Serial.print("alarmHigh = ");
Serial.println(alarmHigh);
Serial.print("alarmLow = ");
Serial.println(alarmLow);
}
Serial.println();
delay(1000);
}
uint16_t calcCRC(byte *data, byte panjang)
{
int i;
uint16_t crc = 0xFFFF;
for (byte p = 0; p < panjang; p++)
{
crc ^= data[p];
for (i = 0; i < 8; ++i)
{
if (crc & 1)
crc = (crc >> 1) ^ 0xA001;
else
crc = (crc >> 1);
}
}
return crc;
}
Ini simulasinya gimana Gan output RS485
sama saja, tentu dengan tambahan kode slave-nya
gan, bisa enggak komunikasinya tranfer id rfid? yang masternya melakukan registrasi rfid dan slavenya menerima id rfid yg didaftarkan di master dan id rfid tersebut bisa d kases di slavenya?
mas mau nanya
jika master nya itu terdiri ada arduino + reader rfid kemudian terdapat lebih dari 4 slave yang terdapat juga (arduino + reader rfid), pada master kita melakukan registrasi rfid kemudian master ini mengirimkan id rfidnya ke slave dan di slave bisa mengakses id rfid tersebut. itu bagaimana?
Dalam komunikasi modbus, data rfid itu bisa dikirim,
prosesnya sama, cuma perlu penyesuaian data yang dikirim
Maaf mas, mau tanya. bagaimana untuk coding menggunakan 2 Arduino 2 RS485 menggunakan Modbus.
Arudino 1 (Slave) membaca 3 sensor -> RS485 slave -> RS485 Master -> Arduino 2 ( Master) menerima data 3 sensor?.
gunakan library modbus master dan modbus slave yang sudah ada,
atau buat sendiri sesuai protokol modbus
apa arti dari ” byte *ptr ” , “ptr” digunakan untuk apa mas? dan kenapa “uint16_t crc = 0xFFFF;” apa arti nilai hexa? menyesuaikan alat?.
Terima Kasih
byte *ptr; adalah variabel pointer, digunakan untuk menyimpan alamat
uint16_t crc = 0xFFFF; 0xFFFF merupakan nilai awal untuk mencari crc (umum digunakan pada crc 16)
mas, kalau mau baca input register di 0x01 doang sebanyak 2 word, unttuk float , yang di-edit yg mana?
sesuaikan bagian ini
byte perintah[] = {0x01, 0x04, 0x00, 0x00, 0x00, 0x08};
atau
misi mas mau tanya, kalo slave yang kita gunakan misal ada 2, perlu tambahan coding nya seperti apa ya?
buat kode yang mirip dan bedakan nomor id-nya
mas mau tanya, kalo pembacaan datanya langsung dari power meter ke rs485 tapi ga pake pzem bisa ga mas??
jika power meternya punya fitur komunikasi rs485, bisa
mas mau tanya cara bacanya sensor pzem itu sendiri bagaimana mas ?
pzem punya register2 (data pembacaannya) di alamat tertentu (bisa di lihat di datasheetnya)
untuk membacanya perlu dikirimkan kode panggil/perintah, dan akan di respon oleh pzem sesuai perintah yang diterimanya
terima kasih gan sharing ilmunya.
mau tanya kalo digunakan dengan esp32 apa ada perubahan pada library dan codingnya.
apa program ini bisa berjalan jika digunakan pada esp32?
pada prinsipnya bisa (compile success –dengan tambahan library SoftwareSerial–)
jika mau membuat pembacaan multiple slave, apakah serial pzem yang dipakai hanya 1 atau 2? jika hanya satu pada bagian loopnya menjadi seperti apa ya?
terima kasih banyak.
cukup 1 saja, address panggil nya yang di ganti2
mas kok di saya tidak berfungsi ya? di serial kosong aja gitu
agak sulit di analisa
:: cek rangkaian (gunakan avo meter)
:: coba gunakan library2 lain (mungkin ngga cocok)
mas, kalo energi nya ga kebaca gimana ya?
biasanya energi bersifat komulatif, kalau nilainya 0 berarti masih baru atau telah direset
biar ada nilainya pasang beban dan nyalakan hingga watthour-nya bertambah (tidak 0 lagi)