Remot kontrol adalah instrumen jarak jauh (remot) yang mengendalikan perangkat untuk melaksanakan fungsi-fungsi sesuai perintah. Komunikasi antara remot kontrol dan perangkat (rtu) bisa menggunakan kabel atau tanpa kabel (bluetooth, wifi, radio).
Android bisa dimanfatkan sebagai remot kontrol dengan memanfatkan fasilitas sensor-sensor yang dimilikinya. Dalam contoh ini (pengontrolan mobil arduino) memanfatkan fitur berikut :
- Bluetooth
- Sensor orientasi/kemiringan
- Touch screen
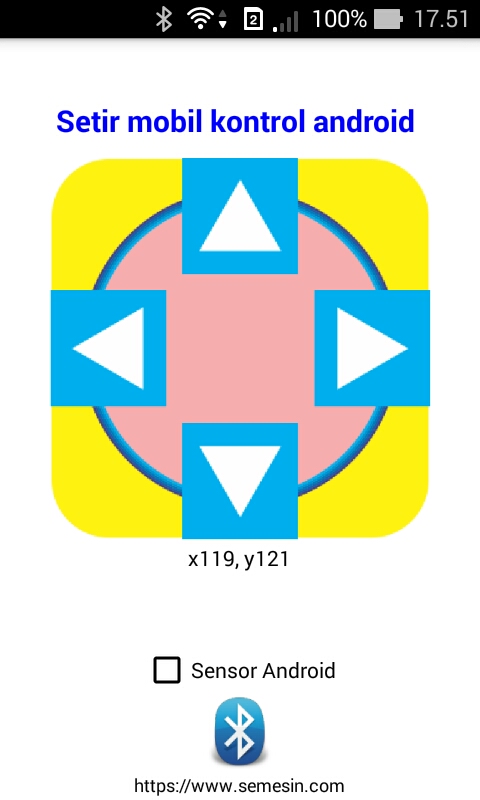
Pengendalian remot kontrol bisa dilakukan dalam 2 mode yaitu mode steer dan mode sensor orientasi.
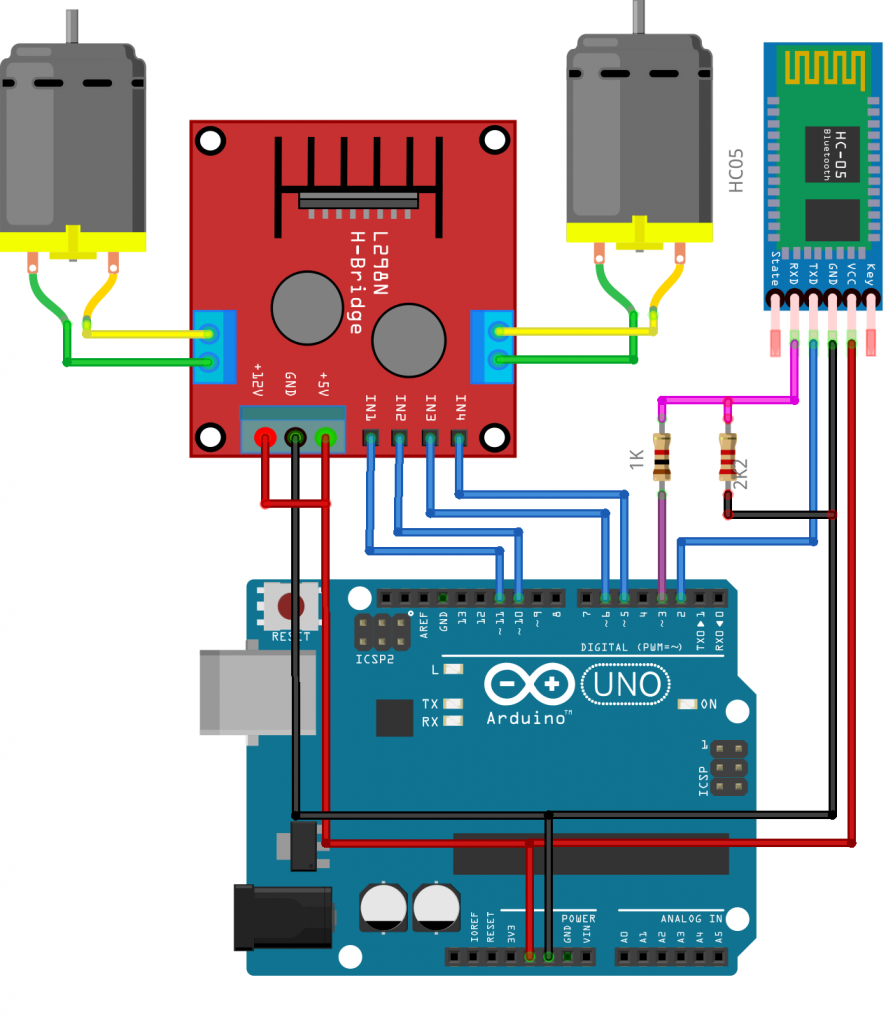
Prototipe mobil arduino dibuat dari komponen berikut :
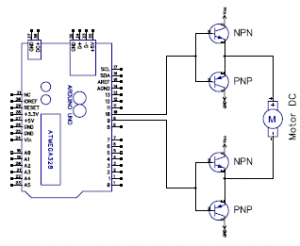
- Arduino uno
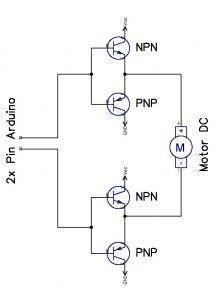
- Driver motor L298
- Motor DC
- Bluetooth HC-05 dan resistor pembagi tegangan
- Rangka miniatur mobil
Fokus dalam perancangan mobil arduino ini adalah pengendalian kecepatan motor kiri dan kanan sehingga diperoleh gerakan yang mulus/smooth. jadi tidak seperti kendali steer mobil pada umumnya yang menggunakan metode putaran poros roda untuk melakukan belokan. Untuk itu digunakan formula gerakan menggunakan pwm (pulse width modulation) dan pengaturan kecepatan roda kiri dan kanan sehingga dihasilkan gerakan yang halus.
berikut skema pengendalian gerakan mobil-mobilan arduino melalui android :
sketch arduino untuk mobil remot dengan gerakan yang halus:
#include <SoftwareSerial.h>
#define pinMotorKiriPlus 5
#define pinMotorKiriMinus 6
#define pinMotorKananPlus 10
#define pinMotorKananMinus 11
SoftwareSerial bluetooth(2, 3);
int x = 128;
int y = 128;
byte kiri;
byte kanan;
char buffer[32];
bool statusBerhenti;
void setup() {
pinMode(pinMotorKiriPlus, OUTPUT);
pinMode(pinMotorKiriMinus, OUTPUT);
pinMode(pinMotorKananPlus, OUTPUT);
pinMode(pinMotorKananMinus, OUTPUT);
Serial.begin(9600);
Serial.println(F("Remot kontrol android untuk mobil arduino melalui bluetooth"));
Serial.println(F("https://www.project.semesin.com"));
Serial.println();
bluetooth.begin(9600);
Serial.println("Sistem mulai");
}
void loop() {
while (bluetooth.available())
{
char c = bluetooth.read();
switch (c)
{
case 'x':
x = bluetooth.parseInt();
break;
case 'y':
y = bluetooth.parseInt();
break;
}
}
if ((y > 96) && (y < 160))
{
if (!statusBerhenti)
{
digitalWrite(pinMotorKiriPlus, LOW);
digitalWrite(pinMotorKiriMinus, LOW);
digitalWrite(pinMotorKananPlus, LOW);
digitalWrite(pinMotorKananMinus, LOW);
Serial.println("berhenti");
statusBerhenti = true;
}
}
else
{
float rasioKiri = 1.0 * x / 255;
float rasioKanan = 1.0 * (255 - x) / 255;
byte kecepatan = abs(y - 128) * 2;
if (rasioKiri > rasioKanan)
{
rasioKanan += 1 - rasioKiri;
rasioKiri = 1;
}
else
{
rasioKiri += 1 - rasioKanan;
rasioKanan = 1;
}
kiri = constrain(rasioKiri * kecepatan, 0 , 255);
kanan = constrain(rasioKanan * kecepatan, 0 , 255);
sprintf(buffer, "%s : kiri: %d, kanan: %d", y < 128 ? "Maju" : "mundur", kiri, kanan);
Serial.println(buffer);
if (y < 128)
{
analogWrite(pinMotorKiriPlus, kiri);
analogWrite(pinMotorKananPlus, kanan);
digitalWrite(pinMotorKiriMinus, LOW);
digitalWrite(pinMotorKananMinus, LOW);
}
else
{
analogWrite(pinMotorKiriMinus, kiri);
analogWrite(pinMotorKananMinus, kanan);
digitalWrite(pinMotorKiriPlus, LOW);
digitalWrite(pinMotorKananPlus, LOW);
}
statusBerhenti = false;
}
}
block app inventor remot kontrol android:
![]()
screenshoot Remot kontrol arduino pengendali mobil-mobilan:
File app inventor remot kontrol: